THOMAS Solution
The THOMAS platform consists of the following main components:
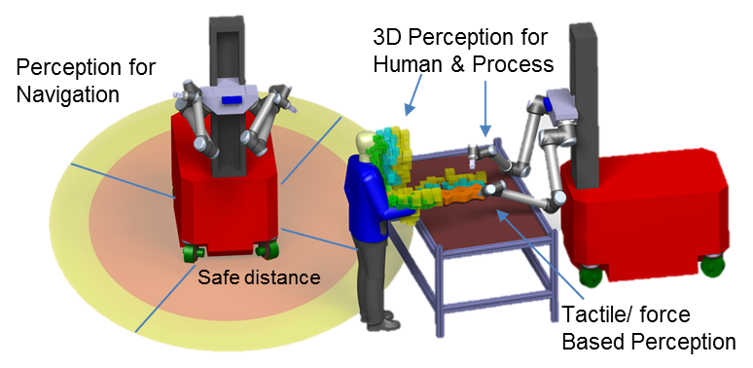
- Environment and process perception
THOMAS pilot cases foresee the recognition, handling and assembly of parts of different shapes by both stationary and moving robots. Significant capabilities of robot actuation and of sensor data processing and interpretation are required to reflect the environment and meet certain task specifications.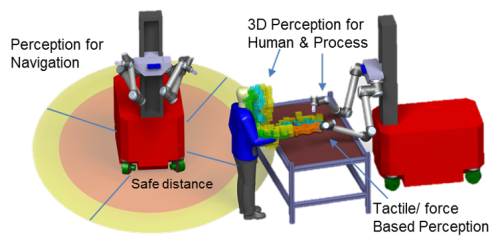
The handled/assembled products will also be either stationary or moving depending on the end user shop floor specification. As a result, it is necessary to bring together multiple sensing and perception technologies to enable dexterous and variable sensitivity operations.
- Skills for automatically programming and performing multiple tasks
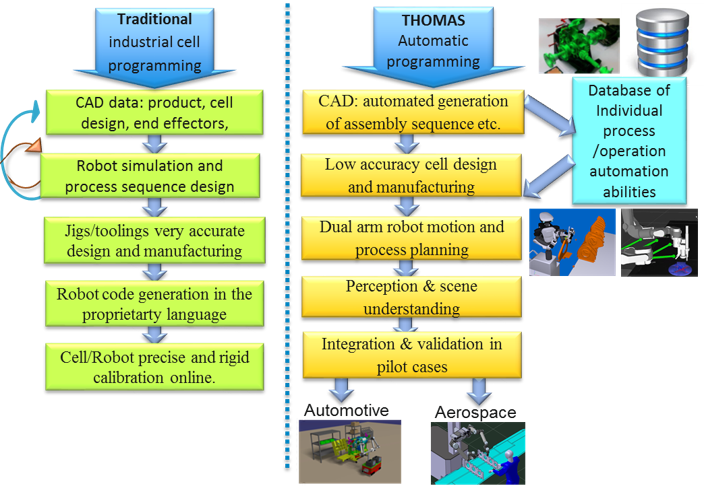
The goal in THOMAS is to capture this process and sequence information from the CAD system and transfer it directly to the robot, so that the robot programs itself automatically. In other words, the project proposes to provide the robot with autonomy to adapt online its assembly plan, to cope with the many product variants.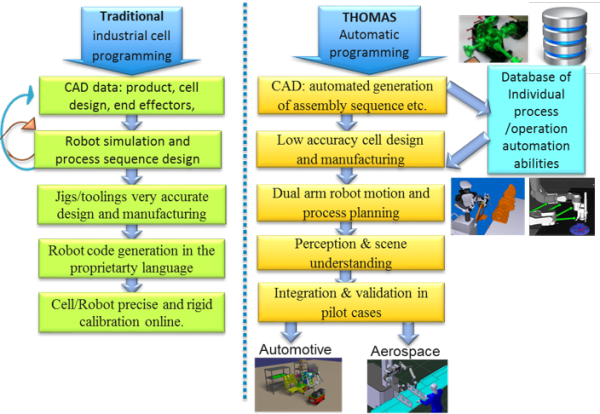 The main purpose of the THOMAS easy-programming is to switch from a static assembly plan generated in OLP with a robot-specific and part-specific postprocessor to a schematic sequence of abilities, combined and sequenced adequately to provide the correct assembly.
The main purpose of the THOMAS easy-programming is to switch from a static assembly plan generated in OLP with a robot-specific and part-specific postprocessor to a schematic sequence of abilities, combined and sequenced adequately to provide the correct assembly.
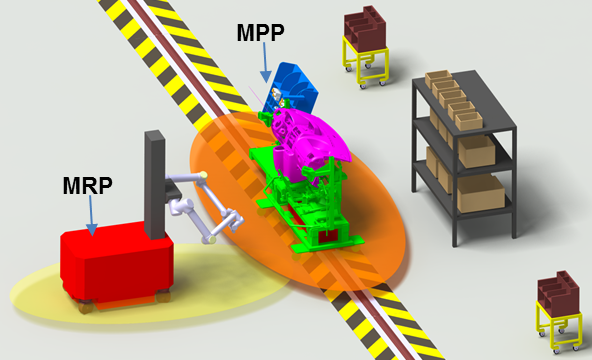
- Mobile robotic resources and products
THOMAS will not design a “yet-one-more” mobile robot, but it will integrate various hardware components to form a highly versatile mobile dual-arm manipulator.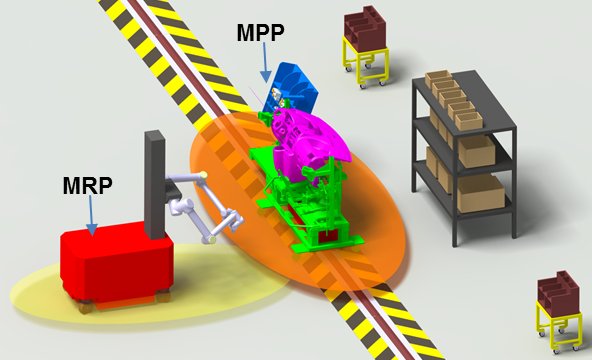 Two platform types will be used:
Two platform types will be used:
The MPP will consist of an “assistant” vehicle responsible for carrying parts and products, acting as moving “workstation” for human operators or the MPRs.
The MRP will be a versatile dual-arm mobile manipulator. This configuration will provide high versatility to tackle a large variety of assembly operations which require dual arm operation, sequential independent operation of each arm or simultaneous combined operation of both arms.
- Dynamically reconfigurable shopfloor – Network of services
THOMAS aims to achieve two major functionalities:Simplification of the integration and networking of the control and sensor data utilizing web based, and ontology services. The expected result in terms of communication will be the distribution of the acquired data to all relevant resources (e.g. mobile robots, humans via HMIs etc.).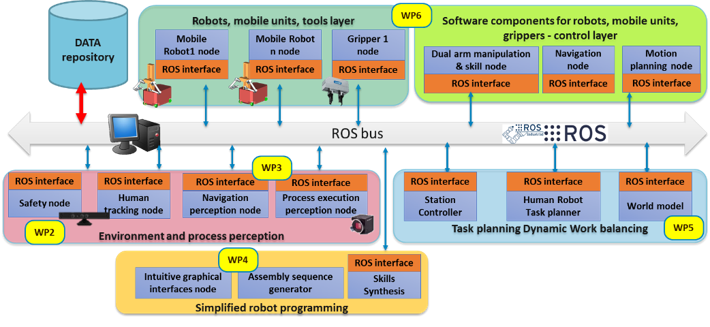
Use of common integration architecture to monitor the execution of the production plan and dynamically redistribute the workload to adapt the production in real time. A digital world model will be created that will be continuously updated through the service network by all the perception components. Using this information and the status reporting of the autonomous robots, the workload balancing system will be able to generate alternative allocations for human and robots.
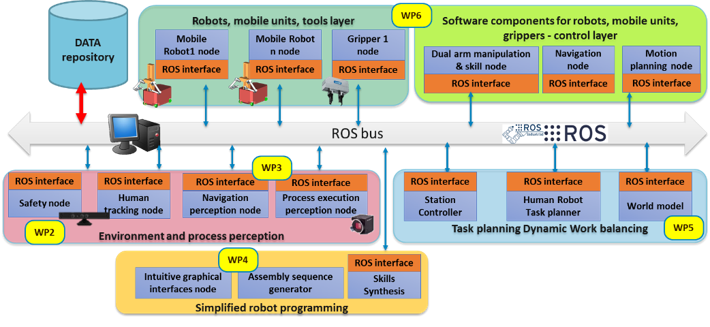
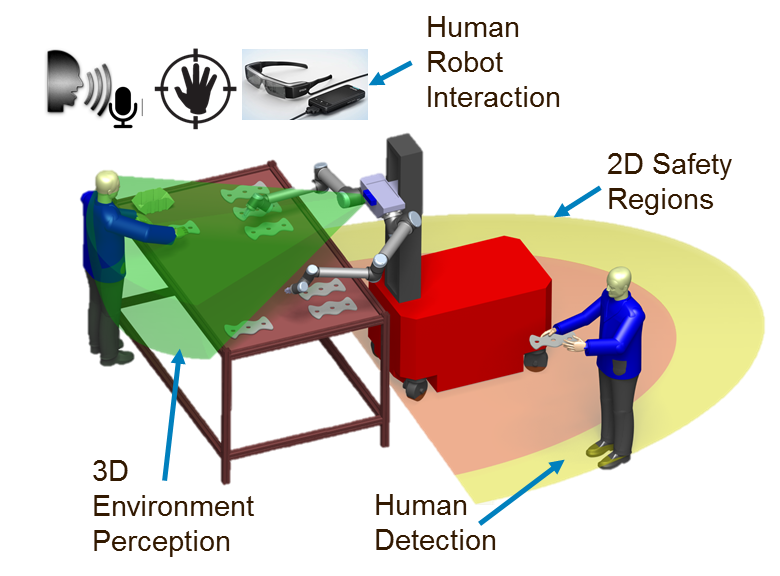
- Safe Human – Robot and Robot-Robot collaboration
In THOMAS the combination of standard low cost 2D safety laser scanners with 3D sensors will guarantee workers safety. Indeed, in a number of applications the 3D sensor is not needed to satisfy safety regulations, while being much more expensive. In other applications, 3D accurate workspace monitoring is a key requirement to introduce robots.
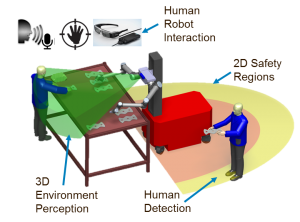
The THOMAS technology providing a modular/hybrid approach will allow configuring the safety solution to reach an optimized cost-benefit-ratio. Since human safety is one of the main obstacles to a wider adoption of robotics, THOMAS will highlight EU and local legislation to ensure that the results conform to real practice and contribute to the update of standards.